Recurso educativo

Recurso
Ver recurso educativo
Nombre
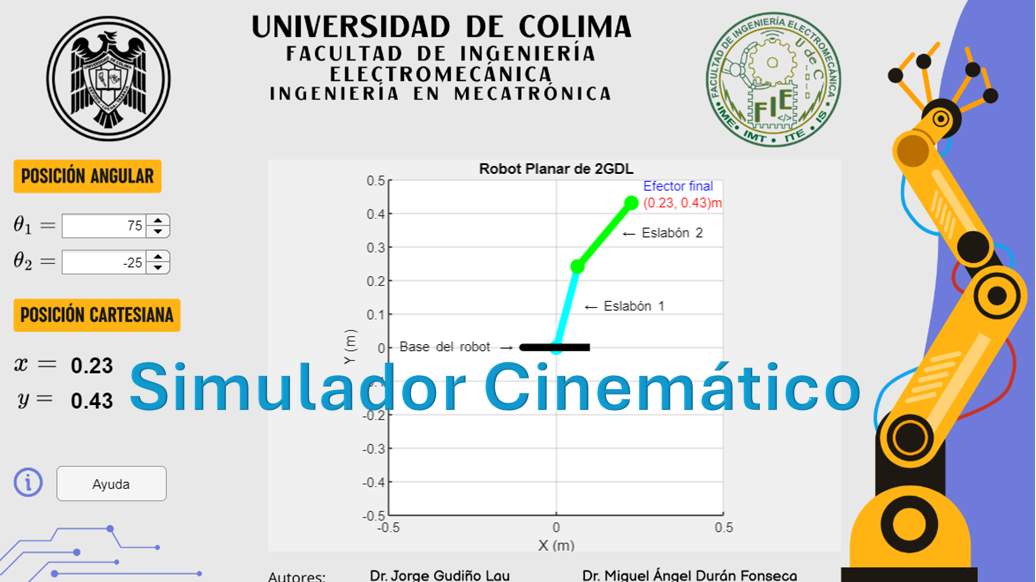
Modelado cinemático directo
Autor
Jorge Gudiño Lau
Colaboradores
- - Autor Jorge Gudiño Lau
- - Autor Miguel Durán Fonseca
Fecha de publicación
8 de octubre de 2025
Área
Ingeniería y Tecnología
Nivel educativo
Educación superior, Escuela, Capacitación, Educación media superior
Tipo de recurso
Simulación
Metadatos
Ver metadatos
Descripción
Este simulador de cinemática directa es programado en matlab y resuelve el modelo cinemático directo de un robot manipulador planar de dos grados de libertad, es desarrollado con el objetivo de motivar e involucrar a los estudiantes de educación superior en el campo de la robótica y la mecatrónica, despertando su interés por esta disciplina y reforzando sus habilidades académicas y tecnológicas.
Licencia de uso
Reconocimiento (CC BY)
Opiniones del recurso
Comentarios
-- No hay comentarios --